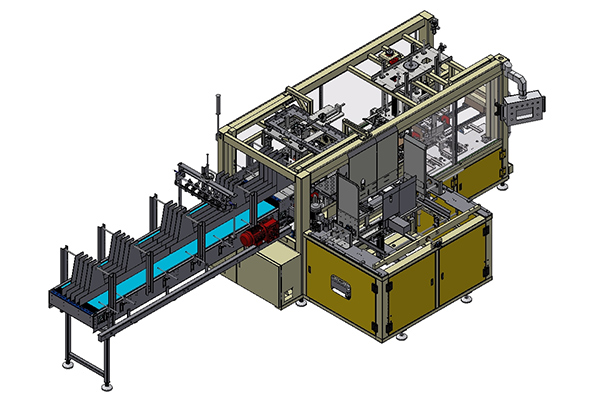
Servokoordinatkassepakkelinje (med papskillevæg)

Emballageproduktionslinjen består af en højhastighedsdeler, en produkttransportlinje, en gribetransportlinje, en Hbot, en dobbeltakslet bevægemekanisme, en kassetransportlinje, en detektionsmekanisme, en papskillevægsgriber, et papskillevægsfødningssystem, en servokoordinat, en flaskegriber og et beskyttelseshegn. Højhastighedsdeleren deler produkterne i flere baner, mens dobbeltakslet bevægemekanismen accelererer produktpassagen. Når produktet ankommer til papskillevægsstationen, læsser Scar-robotten papskillevæggen i de arrangerede produkter. Produkterne ankommer til sorteringstransportøren. Derefter plukkes produkterne af griberen og placeres i papkassen, og kassetransportøren transporterer kassen med produktet ud.
Det komplette pakkesystemlayout

Hovedkonfiguration
| Robotarm | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| VFD | Danfoss |
| Fotoelektrisk sensor | SYG |
| Berøringsskærm | Siemens |
| Lavspændingsapparater | Schneider |
| Terminal | Føniks |
| Pneumatisk | FESTO/SMC |
| Sugeskive | PIAB |
| Leje | KF/NSK |
| Vakuumpumpe | PIAB |
| PLC | Siemens / Schneider |
| HMI | Siemens / Schneider |
| Kædeplade/kæde | Intralox/rexnord/Regina |
Beskrivelse af hovedstrukturen




Flere videoshows
- Servokoordinatkassepakker til glasflasker med papskillevæg